3D-MNIST Image Classification
- 19 mins
By Shashwat Aggarwal on January 12, 2018.
Introduction
The MNIST [1] is the de facto “hello world” dataset for anyone getting started with computer vision. It contains a total of 70,000 examples divided into training and testing sets (6:1). Since its release in 1999, this classic dataset of handwritten images has served as the basis for benchmarking classification algorithms. Various emerging machine learning techniques have been tested with the MNIST, that has remained a reliable resource for researchers and learners alike. More recently, Convolutional Neural Networks (CNN), a class of Deep Neural Networks have demonstrated immense success in the field of computer vision [2]. The MNIST dataset, in particular, has been effectively classified using architectures of this type, with the current state-of-the-art at a high 99.79% accuracy [3].
MNIST is a good database for people who want to get acquainted with computer vision and pattern recognition methods to solve real-world problems, but most of the real-world vision problems like autonomous robots and scene understanding deal with 3D datasets. The availability of 3D data has been increasing rapidly as the use of sensors which provide 3D spatial readings in autonomous vehicles and robots becomes more prevalent. For this reason, the ability of these machines to automatically identify and make inferences about this data has become a crucial task for them to operate autonomously.
Recently, a 3D version of the MNIST was released on Kaggle [4]. The dataset was created by generating 3D point clouds from the images of the digits in the original 2D MNIST. The script for generating point clouds can be found here. This dataset can be considered as a good starting point for getting familiar with 3D vision tasks. In this blog post, we explore this dataset and empirically compare the performance of various machine learning and deep learning based algorithms for the classification of 3D digits.
Overview of 3D MNIST Dataset
The 3D MNIST dataset is available in HDF5 file format, here. The dataset contains 3D point clouds, i.e., sets of (x, y, z) coordinates generated from a portion of the original 2D MNIST dataset (around 5,000 images). The point clouds have zero mean and a maximum dimension range of 1. Each HDF5 group contains:
- “points” dataset:
x, y, zcoordinates of each 3D point in the point cloud. - “normals” dataset:
nx, ny, nzcomponents of the unit normal associate to each point. - “img” dataset: the original MNIST image.
- “label” attribute: the original MNIST label.
In addition to train and test point clouds, the dataset also contains full_dataset_vectors.h5 that stores 4096-D vectors obtained from voxelization of all the 3D point clouds and their randomly rotated copies with noise. The full_dataset_vectors.h5 is splitted into 4 groups:
X_train = f["X_train"][:] # shape: (10000, 4096)
y_train = f["y_train"][:] # shape: (10000,)
X_test = f["X_test"][:] # shape: (2000, 4096)
y_test = f["y_test"][:] # shape: (2000,)Here is an example to read a digit and store its group content in a tuple.
with h5.File('train_point_clouds.h5', 'r') as f:
# Reading digit at zeroth index
a = f["0"]
# Storing group contents of digit a
digit = (a["img"][:], a["points"][:], a.attrs["label"])Let’s first visualize the contents stored in the tuple with matplotlib. The following code plots the first 15 images from the original 2D MNIST with their corresponding labels:
# Plot some examples from original 2D-MNIST
fig, ax = plt.subplots(3,5, figsize=(12, 12), facecolor='w', edgecolor='k')
fig.subplots_adjust(hspace = .5, wspace=.2)
for ax, d in zip(axs.ravel(), digits):
ax.imshow(d[0][:])
ax.set_title("Digit: " + str(d[2]))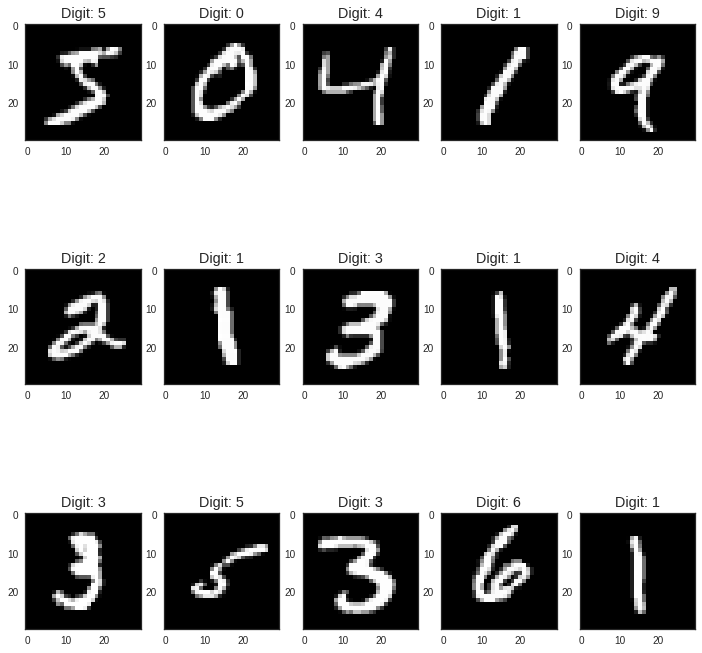
Before visualizing the 3D point clouds, let’s first discuss about Voxelization. Voxelization is the process of conversion of a geometric object from its continuous geometric representation into a set of voxels that best approximates the continuous object. The process mimics the scan-conversion process that rasterizes 2D geometric objects, and is also referred to as 3D scan-conversion.

We use this process to fit an axis-aligned bounding box called the Voxel Grid around the point clouds and subdivide the grid into segments, assigning each point in the point cloud to one of the sub boxes (known as voxels, analogous to pixels). We split the grid into 16 segments along each axis resulting in a total of 4096 voxels, equivalent to the 4th level of an Octree.
voxel_grid = VoxelGrid(digit, x_y_z = [16, 16, 16])The code above generates a voxel grid of 16 × 16 × 16 = 4096 voxels, with the structure attribute representing a 2D array, where each row represents a point in the original point cloud and each column represents the n_voxel where it lies with respect to [x_axis, y_axis, z_axis, global].
voxel_grid.structure[0]array([ 5, 3, 7, 477])
The histogram shown below visualize the number of points present within each voxel. From the plot, it can be seen that there are a lot of empty voxels. This is due to the use of a cuboid bounding box to ensure that the Voxel Grid will divide the cloud in a similar way even when the point clouds are oriented to different directions.
# Get the count of points within each voxel.
plt.title("DIGIT: " + str(digits[0][-1]))
plt.xlabel("VOXEL")
plt.ylabel("POINTS INSIDE THE VOXEL")
count_plot(voxels[0].structure[:,-1]) 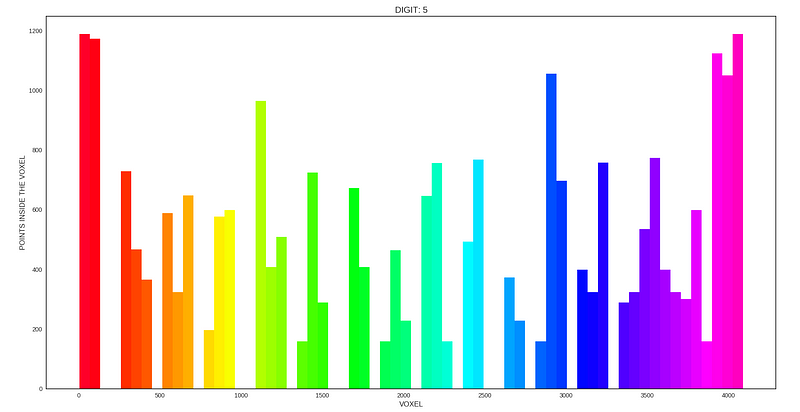
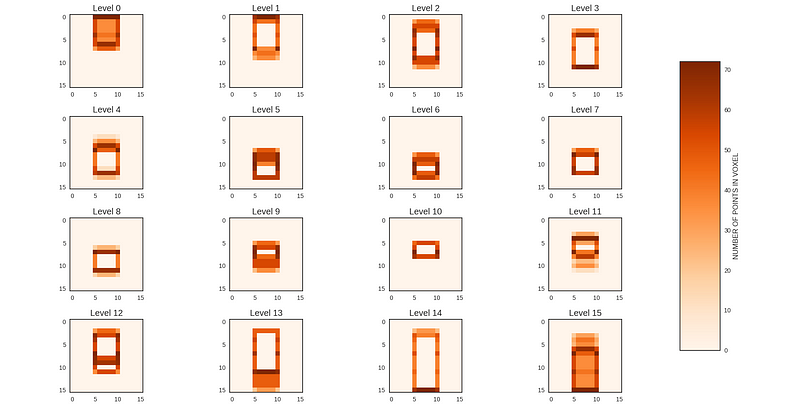
We can visualize the Voxel Grid using the built-in helper function plot() defined in the file plot3D.py provided along with the dataset. This function displays the sliced spatial views of the Voxel Grid around the z-axis.
>>> # Visualizing the Voxel Grid sliced around the z-axis.
>>> voxels[0].plot()
>>> plt.show()
Now we visualize the 3D point clouds using an open-source 3D software, CloudCompare. We save the Voxel Grid structure as the scalar fields of the original point clouds and render 3D images with CloudCompare.
>>> # Save Voxel Grid Structure as the scalar field of Point Cloud.
>>> cloud_vis = np.concatenate((digit[1], voxel_grid.structure), axis=1)
>>> np.savetxt('Cloud Visualization - ' + str(digit[2]) + '.txt', cloud_vis)
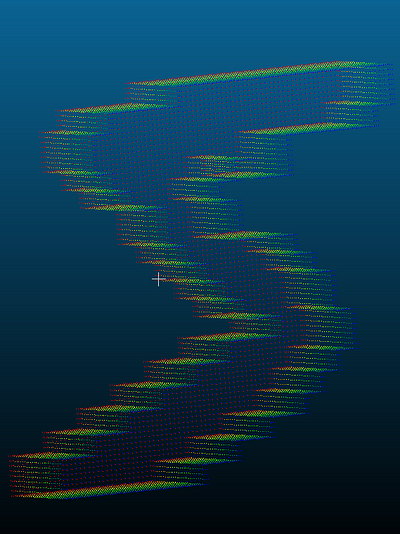
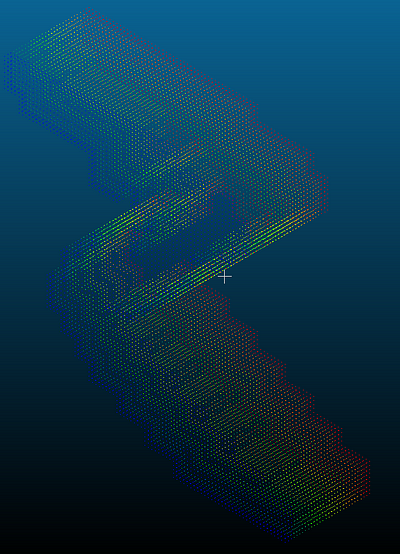

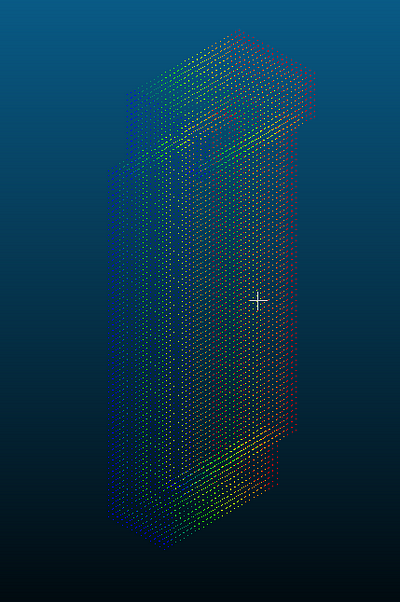
At last, before moving on to the classification task, just for fun, let’s visualize the animation of 3D data slice by slice. Both the rows of the plot show the animation of slices along x, y, z-axis for the digits 5 and 0.
Sklearn Machine Learning Classifiers
We use the full_vectors.h5 dataset. You can use this or generate your own using this script. In machine learning, there’s something called the “No Free Lunch” theorem that in a nutshell, states that no one algorithm works best for every problem. So we try many machine learning algorithms and choose the best suited to our problem.

Let’s start with the simplest yet powerful machine learning classifier — Logistic Regression:
>>> reg = LogisticRegression()
>>> reg.fit(X_train, y_train)
>>> print("Accuracy: ", reg.score(X_test, y_test))
Accuracy: 0.582
Logistic Regression provides a decent baseline for other classifiers with an test-accuracy score of 58.2%.
Next we move on to Decision Trees:
>>> dt = DecisionTreeClassifier()
>>> dt.fit(X_train, y_train)
>>> print("Accuracy: ", dt.score(X_test, y_test))
Accuracy: 0.4865
Decision Trees gives a test-accuracy of 48.65%, i.e. 10 points lower as compared to Logistic Regression. The performance of Decision Trees can possibly be improved with hyper-parameter tuning and grid-search. But here, we stick to the basics and try to get a rough estimate of the performance of the classifier.
Moving further, let’s try Support Vector Machines:
>>> svm = LinearSVC()
>>> svm.fit(X_train, y_train)
>>> print("Accuracy: ", svm.score(X_test, y_test))
Accuracy: 0.557
We use linear SVMs instead of RBF or Poly kernel based SVM as they take a lot of time to train (you may try training these SVM variants and compare their performance against other classifiers). Linear SVMs perform similar to Logistic Regression with a test-accuracy score of 55.7%.
Now, giving K Nearest Neighbors a shot!
>>> knn = KNN()
>>> knn.fit(X_train, y_train)
>>> print("Accuracy: ", knn.score(X_test, y_test))
Accuracy: 0.5905
KNN performs best among all the previously tried classifiers with 59.05% test-score.
Finally, let’s ensemble; Random Forests:
>>> rf = RandomForestClassifier(n_estimators=500)
>>> rf.fit(X_train, y_train)
>>> print("Accuracy: ", rf.score(X_test, y_test))
Accuracy: 0.685
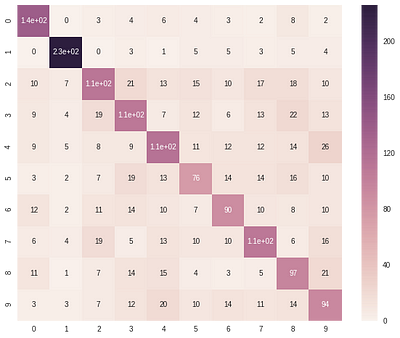
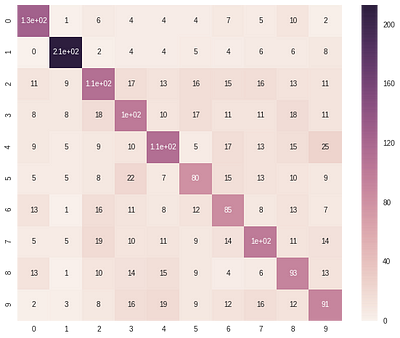
Random Forests outperforms all other classifiers on the classification task. The table below reports the test-accuracy of each classifier on the 3D MNIST dataset. The confusion matrix plots shown below, provides us with the classification report summary of three classifiers namely, Logistic Regression, SVM and Random Forests. From these plots, we observe that most of the classifiers experience difficulty in classifying digits 5, 6 and 9 correctly while find classifying digits like 0, 1 and 4 easy.
| Classifier | Accuracy (%) | | ------------- |:-------------:| | Logistic Regression | 58.2 | | Decision Trees | 48.65 | | Linear SVM | 55.7 | | KNN | 59.05 | | Random Forests | **68.5** |
You can find the complete code for ML-based empirical analysis here. Although Random Forests performs best among the tried classifiers, the 68.5% mark seems way behind its score on the 2D equivalent dataset. So the natural question that arrives is can we do better?

Moving on to Convolutional Neural Networks
Convolutional Neural Networks (CNN), have been immensely successful in classifying the 2D version of MNIST, with the current state-of-the-art model giving a high 99.79% accuracy. So now, let’s see how well these CNN perform with the 3D equivalent of MNIST. We create a 4-layered CNN in keras with two dense layers at the top. For the complete definition of the model, look at the model() method. Since a sample in our dataset is a 4096-D voxel and CNN expects a 4D tensor of shape: (batch_size, height, width, input_channels), so we reshape our dataset into a 4D tensor: (-1, 16, 16, 16).
We tried several other shapes such as
(-1, 64, 64, 1),(-1, 64, 64, 3)but(-1, 16, 16, 16)gave the best results, so we stick with this.
{ % gist imshashwataggarwal/9a4eabf0d03ef755060a5d4b82ef3875#file-2dcnn-py % }
Output
Epoch 1/30
3s - loss: 2.0299 - acc: 0.2922 - val\_loss: 2.2644 - val\_acc: 0.1960
Epoch 2/30
3s - loss: 1.4517 - acc: 0.4913 - val\_loss: 2.0336 - val\_acc: 0.4440
Epoch 3/30
3s - loss: 1.3081 - acc: 0.5364 - val\_loss: 1.6669 - val\_acc: 0.5140
Epoch 4/30
3s - loss: 1.2385 - acc: 0.5595 - val\_loss: 1.4951 - val\_acc: 0.5667
Epoch 5/30
3s - loss: 1.1959 - acc: 0.5799 - val\_loss: 1.2812 - val\_acc: 0.5813
Epoch 6/30
3s - loss: 1.1682 - acc: 0.5826 - val\_loss: 1.1254 - val\_acc: 0.6053
Epoch 7/30
3s - loss: 1.1552 - acc: 0.5909 - val\_loss: 1.0595 - val\_acc: 0.6240
Epoch 8/30
3s - loss: 1.1247 - acc: 0.6008 - val\_loss: 0.9993 - val\_acc: 0.6460
Epoch 9/30
3s - loss: 1.0981 - acc: 0.6142 - val\_loss: 0.9978 - val\_acc: 0.6313
Epoch 10/30
3s - loss: 1.0928 - acc: 0.6103 - val\_loss: 0.9892 - val\_acc: 0.6527
Epoch 11/30
3s - loss: 1.0770 - acc: 0.6202 - val\_loss: 0.9940 - val\_acc: 0.6387
Epoch 12/30
3s - loss: 1.0627 - acc: 0.6215 - val\_loss: 0.9916 - val\_acc: 0.6573
Epoch 13/30
3s - loss: 1.0704 - acc: 0.6239 - val\_loss: 1.0423 - val\_acc: 0.6400
Epoch 14/30
3s - loss: 1.0524 - acc: 0.6296 - val\_loss: 0.9560 - val\_acc: 0.6573
Epoch 15/30
3s - loss: 1.0331 - acc: 0.6320 - val\_loss: 0.9504 - val\_acc: 0.6540
Epoch 16/30
3s - loss: 1.0215 - acc: 0.6353 - val\_loss: 0.9428 - val\_acc: 0.6800
Epoch 17/30
3s - loss: 1.0052 - acc: 0.6461 - val\_loss: 0.9492 - val\_acc: 0.6633
Epoch 18/30
3s - loss: 1.0090 - acc: 0.6389 - val\_loss: 0.9468 - val\_acc: 0.6693
Epoch 19/30
3s - loss: 0.9957 - acc: 0.6520 - val\_loss: 0.9322 - val\_acc: 0.6700
Epoch 20/30
Epoch 00019: reducing learning rate to 0.000500000023749.
3s - loss: 0.9831 - acc: 0.6507 - val\_loss: 0.9482 - val\_acc: 0.6653
Epoch 21/30
3s - loss: 0.9643 - acc: 0.6636 - val\_loss: 0.8976 - val\_acc: 0.6767
Epoch 22/30
3s - loss: 0.9341 - acc: 0.6679 - val\_loss: 0.8920 - val\_acc: 0.6873
Epoch 23/30
3s - loss: 0.9078 - acc: 0.6785 - val\_loss: 0.8755 - val\_acc: 0.6933
Epoch 24/30
3s - loss: 0.9386 - acc: 0.6650 - val\_loss: 0.8968 - val\_acc: 0.6840
Epoch 25/30
3s - loss: 0.9130 - acc: 0.6792 - val\_loss: 0.8872 - val\_acc: 0.6900
Epoch 26/30
3s - loss: 0.8946 - acc: 0.6765 - val\_loss: 0.8736 - val\_acc: 0.6960
Epoch 27/30
3s - loss: 0.8997 - acc: 0.6785 - val\_loss: 0.8668 - val\_acc: 0.7060
Epoch 28/30
3s - loss: 0.8802 - acc: 0.6879 - val\_loss: 0.8859 - val\_acc: 0.6853
Epoch 29/30
3s - loss: 0.8877 - acc: 0.6890 - val\_loss: 0.8732 - val\_acc: 0.6967
Epoch 30/30
3s - loss: 0.8832 - acc: 0.6858 - val\_loss: 0.8768 - val\_acc: 0.6913
Accuracy : 0.698
3D Convolutional Networks in Keras
Finally, we move onto the main objective of this post (:P), 3D CNN. The 3D CNN model is similar to our 2D CNN model. For the complete definition of the model, check the model() method. Now, like with 2D CNN, the 3D CNN expects a 5D tensor of shape (batch_size, conv_dim1, conv_dim2, conv_dim3, input_channels). We reshape out input to a 5D tensor — (-1, 16, 16, 16, 3)and feed it to our 3D CNN.
{ % gist imshashwataggarwal/89e78280267bfd6bf195707ff9b47d93#file-3d_cnn-py % }
Output
Epoch 1/30
11s- loss: 2.1194 - acc: 0.2912 - val\_loss: 2.1434 - val\_acc: 0.1660
Epoch 2/30
10s- loss: 1.3554 - acc: 0.5274 - val\_loss: 1.8831 - val\_acc: 0.4933
Epoch 3/30
10s- loss: 1.1520 - acc: 0.5954 - val\_loss: 2.0278 - val\_acc: 0.3427
Epoch 4/30
10s- loss: 1.0604 - acc: 0.6272 - val\_loss: 1.3859 - val\_acc: 0.5500
Epoch 5/30
10s- loss: 0.9991 - acc: 0.6448 - val\_loss: 1.2405 - val\_acc: 0.6000
Epoch 6/30
10s- loss: 0.9305 - acc: 0.6756 - val\_loss: 1.0759 - val\_acc: 0.6113
Epoch 7/30
10s- loss: 0.8790 - acc: 0.6939 - val\_loss: 1.0644 - val\_acc: 0.6673
Epoch 8/30
10s- loss: 0.8295 - acc: 0.7087 - val\_loss: 0.8908 - val\_acc: 0.6920
Epoch 9/30
10s- loss: 0.7648 - acc: 0.7289 - val\_loss: 0.9673 - val\_acc: 0.6940
Epoch 10/30
10s- loss: 0.7001 - acc: 0.7542 - val\_loss: 0.8410 - val\_acc: 0.7047
Epoch 11/30
10s- loss: 0.6485 - acc: 0.7719 - val\_loss: 0.8781 - val\_acc: 0.7133
Epoch 12/30
10s- loss: 0.5999 - acc: 0.7912 - val\_loss: 0.8172 - val\_acc: 0.7180
Epoch 13/30
10s- loss: 0.5375 - acc: 0.8147 - val\_loss: 0.8366 - val\_acc: 0.7207
Epoch 14/30
10s- loss: 0.4936 - acc: 0.8284 - val\_loss: 0.8288 - val\_acc: 0.7193
Epoch 15/30
10s- loss: 0.4337 - acc: 0.8494 - val\_loss: 0.8528 - val\_acc: 0.7320
Epoch 16/30
10s- loss: 0.4099 - acc: 0.8593 - val\_loss: 1.0491 - val\_acc: 0.6907
Epoch 17/30
10s- loss: 0.3601 - acc: 0.8764 - val\_loss: 0.9005 - val\_acc: 0.7333
Epoch 18/30
10s- loss: 0.3492 - acc: 0.8838 - val\_loss: 0.9155 - val\_acc: 0.7060
Epoch 19/30
10s- loss: 0.2939 - acc: 0.9000 - val\_loss: 1.2862 - val\_acc: 0.7007
Epoch 20/30
10s- loss: 0.2837 - acc: 0.9058 - val\_loss: 0.9119 - val\_acc: 0.7093
Epoch 21/30
Epoch 00020: reducing learning rate to 0.000500000023749.
10s- loss: 0.2786 - acc: 0.9104 - val\_loss: 0.9305 - val\_acc: 0.7287
Epoch 22/30
10s- loss: 0.1521 - acc: 0.9508 - val\_loss: 1.0142 - val\_acc: 0.7473
Epoch 23/30
10s- loss: 0.0944 - acc: 0.9699 - val\_loss: 1.0704 - val\_acc: 0.7300
Epoch 24/30
10s- loss: 0.0831 - acc: 0.9746 - val\_loss: 1.1331 - val\_acc: 0.7407
Epoch 25/30
10s- loss: 0.0691 - acc: 0.9773 - val\_loss: 1.1615 - val\_acc: 0.7393
Epoch 26/30
Epoch 00025: reducing learning rate to 0.000250000011874.
10s- loss: 0.0665 - acc: 0.9785 - val\_loss: 1.1331 - val\_acc: 0.7340
Epoch 27/30
10s- loss: 0.0468 - acc: 0.9856 - val\_loss: 1.1230 - val\_acc: 0.7367
Epoch 28/30
10s- loss: 0.0347 - acc: 0.9888 - val\_loss: 1.1312 - val\_acc: 0.7460
Epoch 29/30
Epoch 00028: reducing learning rate to 0.000125000005937.
10s- loss: 0.0283 - acc: 0.9919 - val\_loss: 1.1361 - val\_acc: 0.7340
Epoch 30/30
10s- loss: 0.0285 - acc: 0.9906 - val\_loss: 1.1466 - val\_acc: 0.7327
Accuracy: 0.771
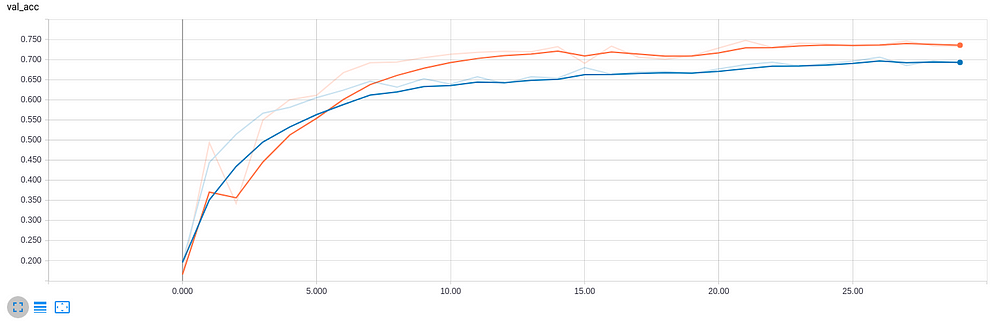
The performance of 2D CNN is close to Random Forests with a test-score of 69.8%, but 3D CNN outperforms all other classifiers by a significant margin, giving a high 77.1% test-accuracy. Below we summarise the classification reports of 2D CNN and 3D CNN through their confusion matrix plots and learning curves respectively.




More 3D Datasets
In this blog post, we experimented with 3D MNIST dataset, that proved to be a good benchmark for starting with 3D Datasets. Here is a list of few more 3D Datasets that are worth playing with:
- Data Science Bowl 2017, available here.
- The Joint 2D-3D-Semantic (2D-3D-S) Dataset, available here.
- The Street View Image, Pose, and 3D Cities Dataset, available here, Project page.
- The Stanford Online Products dataset, available here.
- The ObjectNet3D Dataset, available here.
- The Stanford Drone Dataset, available here.
- More Datasets.
References
- The MNIST database of handwritten digits. Y LeCun, C Cortes. 1998.
- ImageNet classification with deep convolutional neural networks. A. Krizhevsky and I. Sutskever and G. Hinton. NIPS, 2012.
- Regularization of neural networks using dropconnect. L. Wan and M. Zeiler and S. Zhang and Y. L. Cun and R. Fergus. ICML, 2013.
- 3D MNIST Dataset. https://www.kaggle.com/daavoo/3d-mnist/data.
- Voxel. https://en.wikipedia.org/wiki/Voxel#/media/File:Voxels.svg.
- 3D convolutional neural networks for human action recognition. S. Ji and W. Xu and M. Yang and K. Yu. ICML, 2010.
- HDF5 File Format. https://support.hdfgroup.org/HDF5/whatishdf5.html
- Scikit-learn: Machine Learning in Python. Pedregosa et al. JMLR 12, 2011.
- Keras, https://github.com/fchollet/keras. François Chollet. GitHub, 2015.
- Stanford Computational Vision and Geometry Lab, http://cvgl.stanford.edu/resources.html
{kind=link}

Shashwat Aggarwal
Software Engineering Intern @Microsoft | Computer Science Undergradaute